Запчасти к технологическому оборудованию для свиноводства и птицеводства

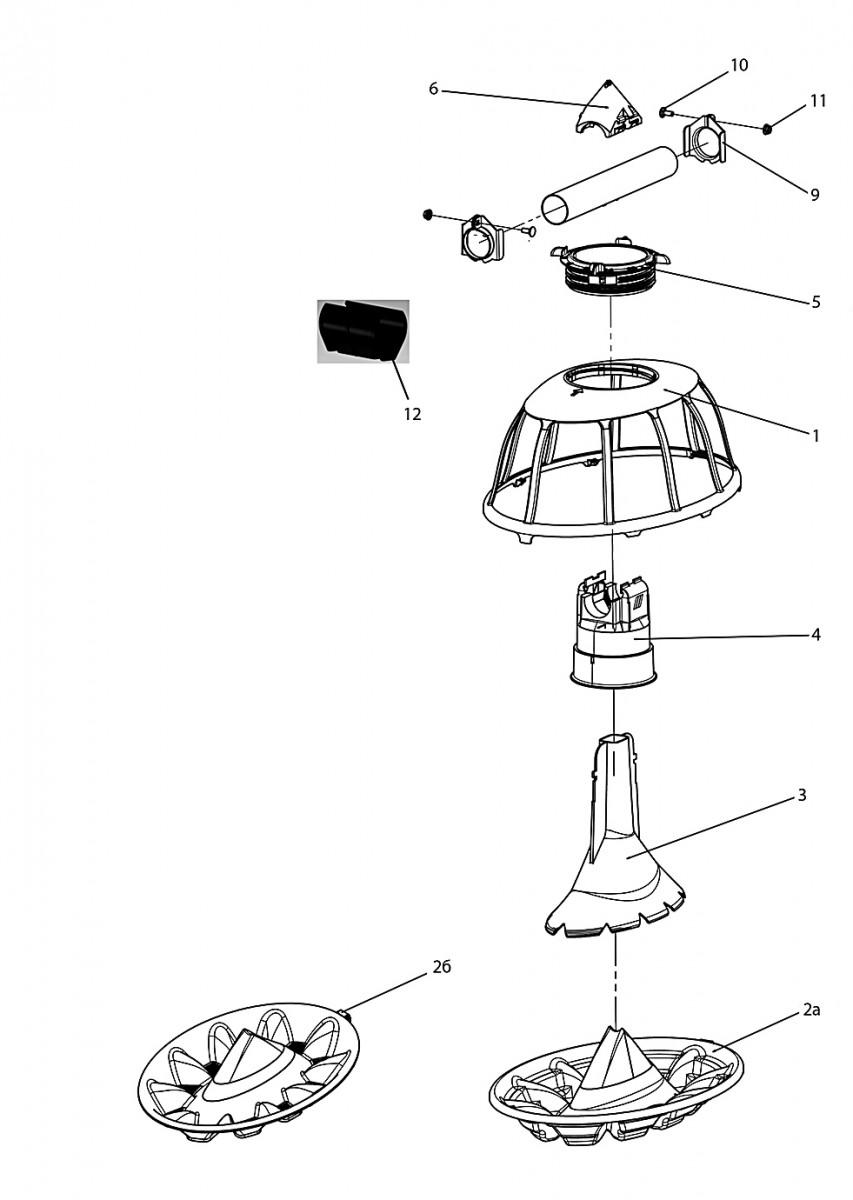
Комплект гибкой впускной части загрузочной воронки00707737
Под заказ

Описание:
Служит для визуального определения прохождения корма к контуру кормления несушки систем LaiCa и Poolai.
Технические характеристики:

Оцинкованная сталь, ПВХ
Стоимость:
Цена доступна после регистрации
Регистрация
Оплата производится в российских рублях по курсу на день выставления коммерческого предложения.
Количество:

Комплектом будет дешевле!


Ваша скидка
10%
Ваша скидка
10%

На этом сайте используются файлы cookie. Продолжая просмотр сайта, вы разрешаете их использование. Подробнее.